pyvista.DataSetFilters.interpolate#
- DataSetFilters.interpolate(
- target: DataSet | _vtk.vtkDataSet,
- sharpness: float = 2.0,
- radius: float = 1.0,
- strategy: Literal['null_value', 'mask_points', 'closest_point'] = 'null_value',
- null_value: float = 0.0,
- n_points: int | None = None,
- pass_cell_data: bool = True,
- pass_point_data: bool = True,
- progress_bar: bool = False,
特定のデータセットからこのメッシュに値を補間します.
ターゲットデータセットは通常,点群です.ターゲットメッシュの点データのみが,このメッシュの点上に補間されます.このメッシュの既存の点データとセルデータを出力に保持するかどうかは,pass_point_dataとpass_cell_dataパラメータでカスタマイズすることができます.これはGauss補間カーネルを使用します.
sharpnessとradiusパラメータを使ってこのカーネルを調整します.このカーネルをN個の最近接ポイントを使用するように切り替えることもできます.If the cell topology is more useful for interpolating, e.g. from a discretized FEM or CFD simulation, use
pyvista.DataObjectFilters.sample()instead.- パラメータ:
- target
pyvista.DataSet サンプリング元のvtkデータオブジェクト.このオブジェクトのポイント配列とセル配列がこのメッシュに補間されます.
- sharpness
float, default: 2.0 Gauss分布のシャープネス(つまり,減衰)を設定します.シャープさが増すと,遠方のポイントの効果は減少します.
- radius
float,optional 基準点を配置する半径を指定します.
- strategy
str, default: "null_value" 補間処理中に "null" ポイントに遭遇した場合に使用するストラテジーを指定します.ヌルポイントは,ローカル近隣(近くの点が内挿する)が空の場合に発生します.ストラテジが
'mask_points'に設定されている場合,ポイントを有効 (=1) またはnull (無効=0)としてマークする出力配列が作成される(NullValueも設定されます.).ストラテジが'null_value'に設定されている場合,出力データ値()はnull_valueに設定される(出力点データに指定されている).最後に,戦略'closest_point'は,単に補間を実行するために最も近い点を使用することである.- null_value
float, default: 0.0 NULL点の値を指定します.NULLポイントが検出されると,各NULLタプルのすべてのコンポーネントがこの値に設定されます.
- n_points
int,optional 指定した場合,補間ベースを形成するために使用される最も近いポイントの数を指定します.これにより,N個の最近接ポイントを使用する代わりに,radius引数が無効になります.通常,この方法では結果が悪くなります.
- pass_cell_databool, default:
True 入力メッシュのオリジナルのセルデータ配列を保持.
- pass_point_databool, default:
True 入力メッシュのオリジナルのポイントデータ配列を保持.
- progress_barbool, default:
False 進行状況を示す進行状況バーを表示します.
- target
- 戻り値:
pyvista.DataSet補間されたデータセット. 戻り値のタイプは入力と一致します.
参考
pyvista.DataObjectFilters.sampleResample array data from one mesh onto another.
pyvista.ImageDataFilters.resample()Resample image data to modify its dimensions and spacing.
例
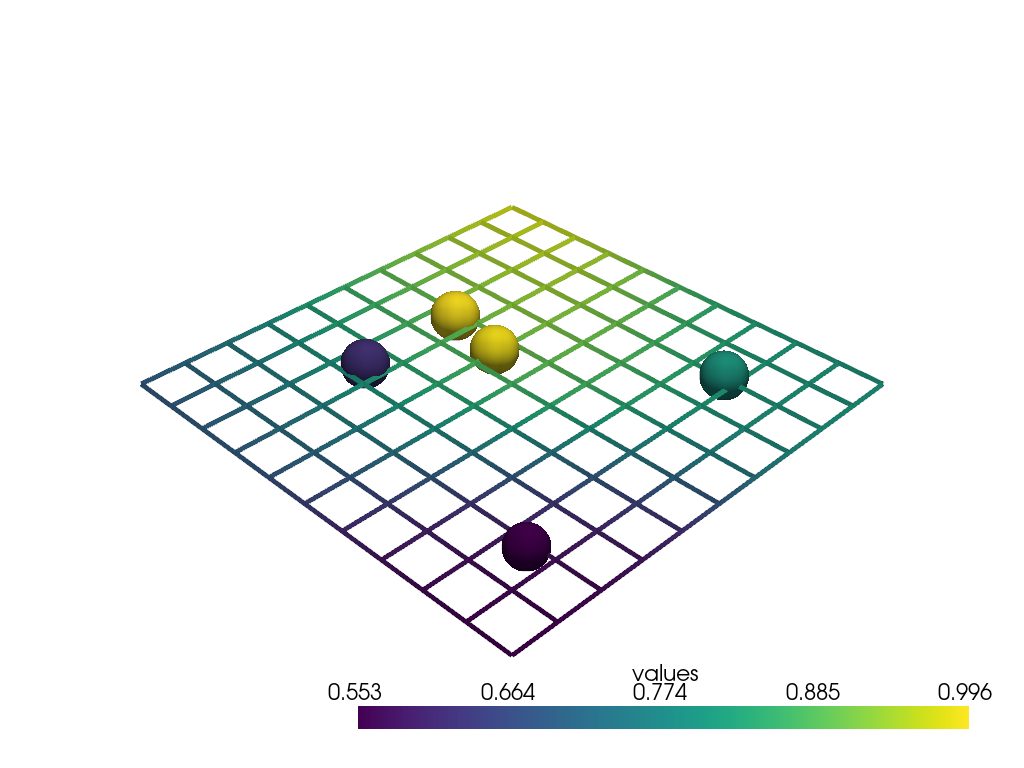
5点の値をサンプル平面に補間します.
>>> import pyvista as pv >>> import numpy as np >>> rng = np.random.default_rng(7) >>> point_cloud = rng.random((5, 3)) >>> point_cloud[:, 2] = 0 >>> point_cloud -= point_cloud.mean(0) >>> pdata = pv.PolyData(point_cloud) >>> pdata['values'] = rng.random(5) >>> plane = pv.Plane() >>> plane.clear_data() >>> plane = plane.interpolate(pdata, sharpness=3) >>> pl = pv.Plotter() >>> _ = pl.add_mesh(pdata, render_points_as_spheres=True, point_size=50) >>> _ = pl.add_mesh(plane, style='wireframe', line_width=5) >>> pl.show()
See 詳細な補間点, 補間/サンプリング法の比較, and 詳細なリサンプリング for more examples using this filter.